Case overview
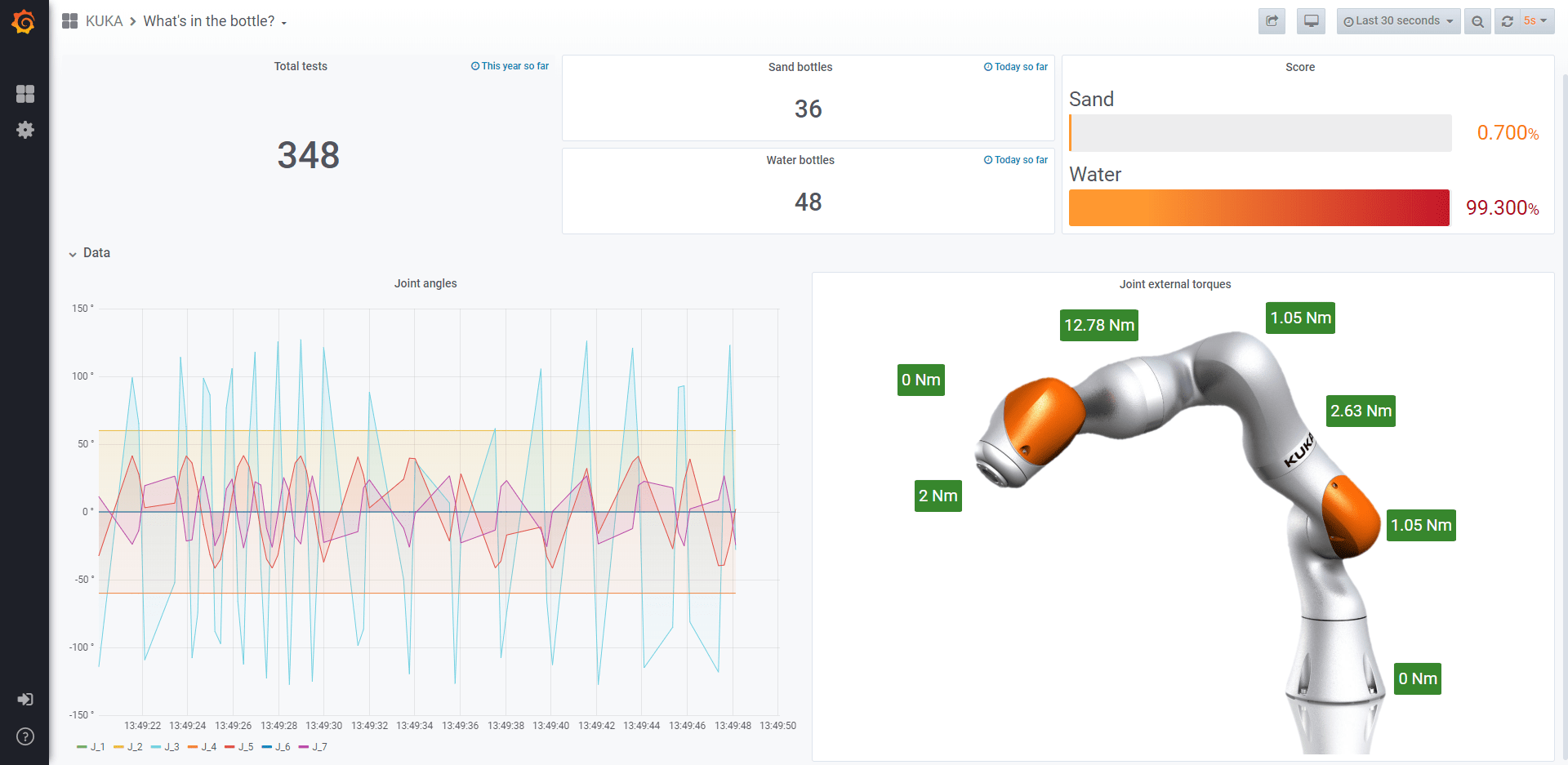
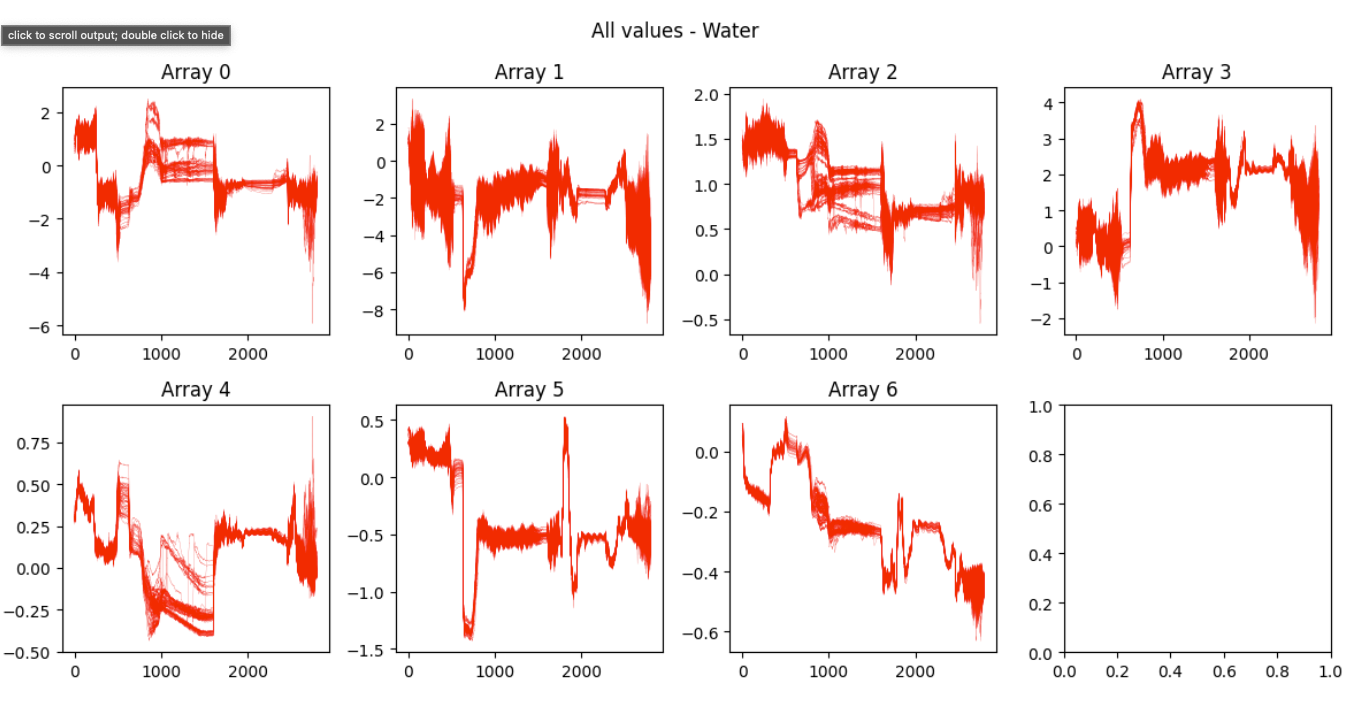
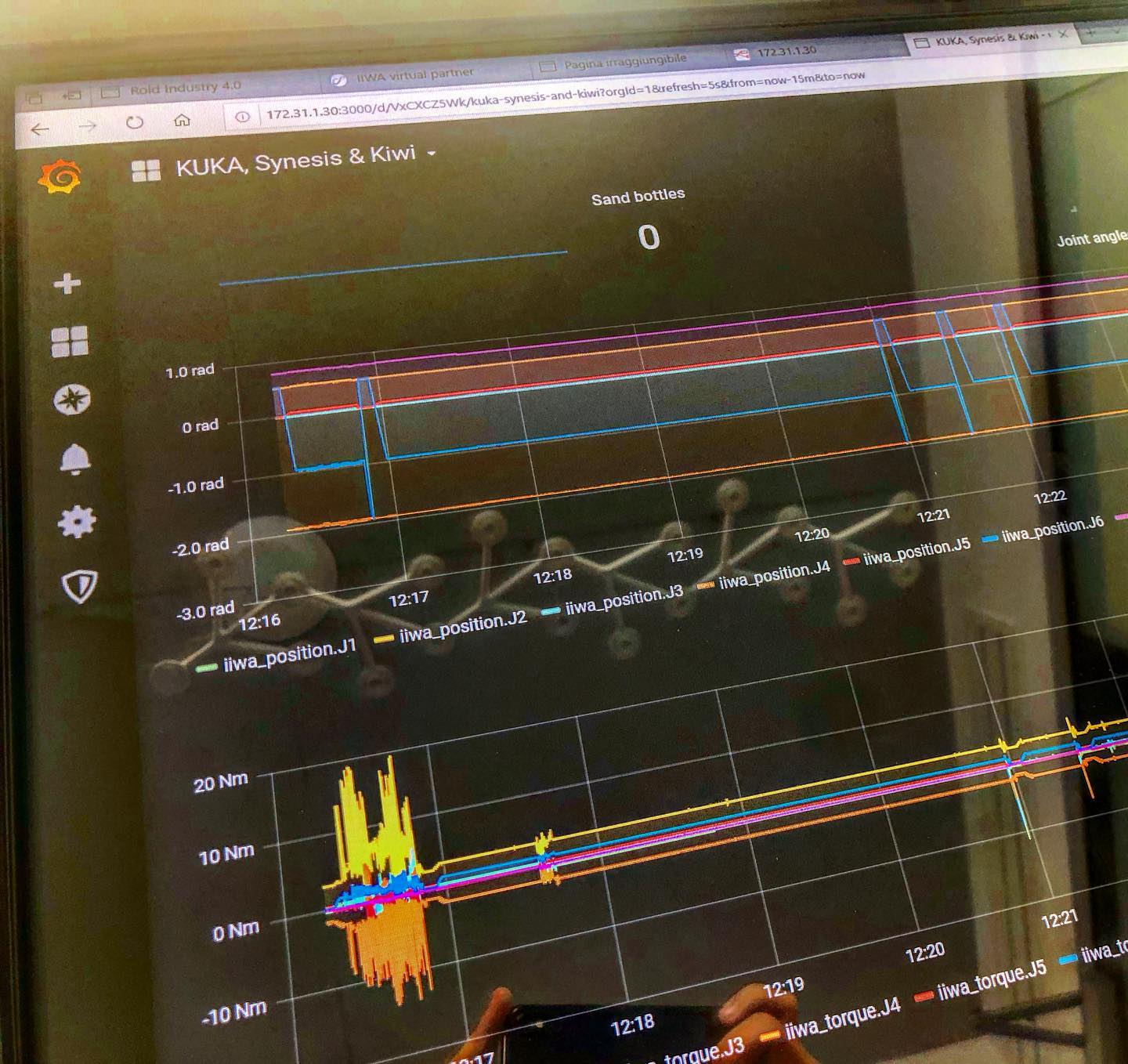
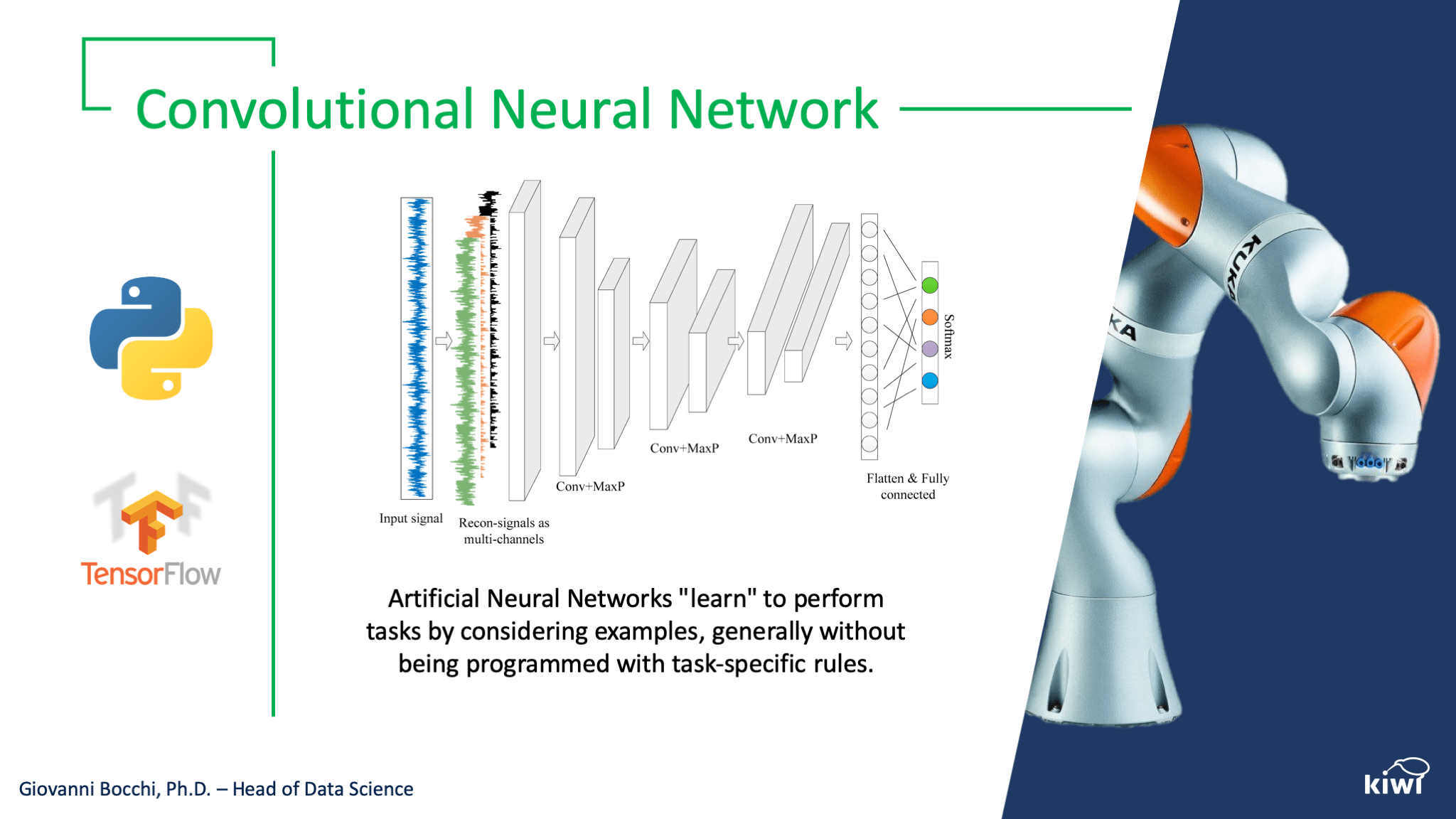
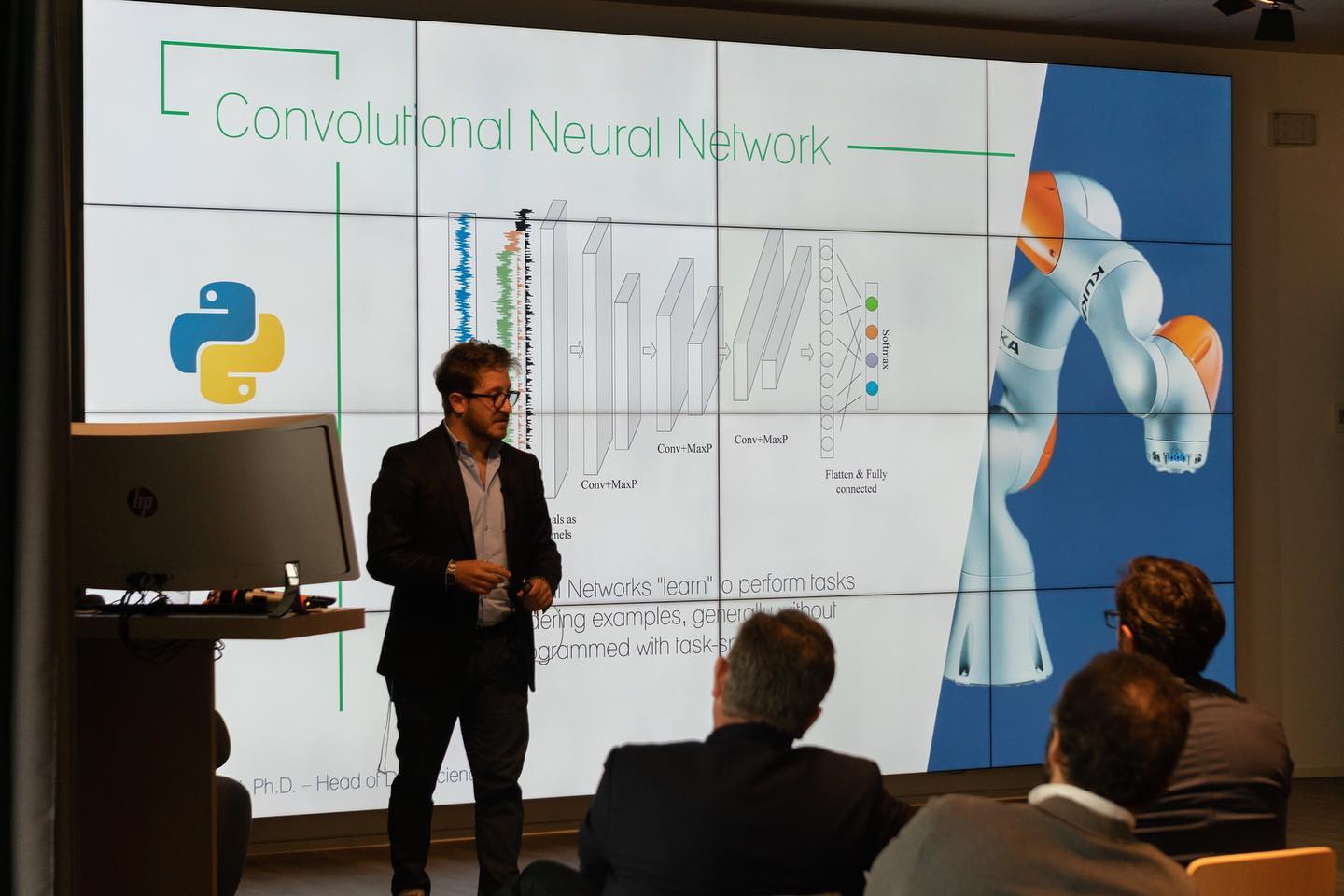
This project focuses on the development of a machine learning model to enable a robotic arm to classify objects through the analysis of vibrations. Unlike traditional visual-based approaches, this innovative system relies on the interpretation of vibrational patterns generated when the robotic arm interacts with objects. The project involves the collection of vibration data using sensors embedded in the robotic arm, which captures unique signatures associated with different materials and shapes. A machine learning algorithm will be trained on a dataset comprising various vibration patterns corresponding to distinct objects.


The Model
The model’s capability to classify objects based on their vibrational characteristics will contribute to a more versatile and adaptable robotic arm, with potential applications in industries where visual cues may be limited or impractical. The successful implementation of this project will showcase the efficacy of vibration-based classification in enhancing robotic capabilities for diverse real-world scenarios.